Leccion CATIA V5: Engranajes cilíndricos dientes rectos. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
Leccion CATIA V5: Engranajes cilíndricos dientes rectos.
Está Vd en: Manuales y Lecciones>>Otros![]() >>Leccion: 1000 Teoria de engranajes cilindricos de dientes rectos.
>>Leccion: 1000 Teoria de engranajes cilindricos de dientes rectos.
 |
|
| eoria de Engranajes. |
1. Engranajes rectos.
2. Circunferencia Primitiva
3. Paso Circular
4. Módulo.
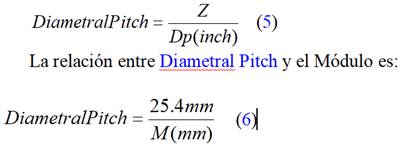
4.1. Diametral Pitch.
5. Forma de los dientes.
5.1. Plano de presión. Círculo Base.
5.2. Trazado de la involuta.
5.3. Resto de los datos del diente.
5.4. Alturas de cabeza y pié del diente.
5.5. Valor del Radio del pié.
5.6. Tabla resumen.
6. Como dibujarlo en CATIA V5.
Primera edición el 30/12/2009
Debemos tener en cuenta que, cuando hablamos de “engranajes” estamos hablando de cómo diseñar un conjunto de dos piezas que deben tener una relación entre ellas.
Los engranajes se clasifican, según el destino, en:
| Entre Ejes Paralelos: | |
| Rectos o cilíndricos. | |
| Helicoidales entre ejes paralelos | |
| Entre Ejes Perpendiculares | |
| Cónicos. | |
| Rueda y tornillo sin-fin | |
| Helicoidales entre ejes perpendiculares. |
En este documento hablaremos de involuta (también llamada evoluta) como una curva en un plano y de envolvente como la superficie que envuelve las rectas resultado de la aplicación de la involuta en 3D.
La Involuta 3D es la aplicación de la teoría del desarrollo de una superficie reglada (en vez del desarrollo de un circulo) que lo que obtiene son extremos rectos de esa superficie al desarrollarse.

![]()
https://es.wikipedia.org/wiki/Engranaje
Sirven para transmitir movimiento circular o lineal (caso de las cremalleras) entre dos ejes paralelos. Es una forma de mejorar, mecánicamente, la rotación entre dos cilindros que tienen sus caras en contactos y que, por lógica, se producirían deslizamientos.
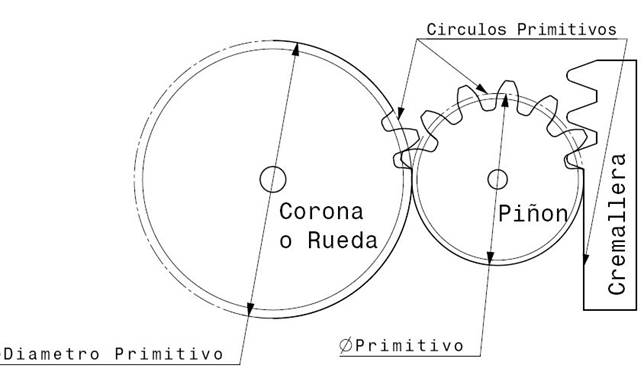
La cremallera se puede considerar una Rueda (o a veces llamada corona) de Diámetro primitivo infinito.
![]()
Los diámetros de esos dos cilindros que, en la figura, hacen contacto, en el engranaje sólo quedan como una circunferencia teórica, pero es muy importante dado que en ella se basan todos los cálculos y la distancia entre los ejes de corona, piñón y cremallera. A esta circunferencia se la denomina “Circunferencia Primitiva” y a su diámetro “Diámetro primitivo” (Dp) y llamaremos a su radio como Rp.
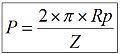
Como es lógico, en un engranaje debemos tener un número entero de dientes (Z). Esto nos lleva a que el paso (espacio entre dos dientes consecutivos, el espacio de un vano mas el espesor de un diente) medido sobre la Circunferencia Primitiva debe ser múltiplo de ![]() (léase Pi), dado que la longitud de la circunferencia es
(léase Pi), dado que la longitud de la circunferencia es ![]() .
.
Luego el Paso Circular (P) viene dado por la fórmula:
 (1) donde Z es el Número de Dientes.
(1) donde Z es el Número de Dientes.
O bien:
 (1a)
(1a)
El espesor del diente (e), medido sobre la circunferencia primitiva, primitiva (No con un calibre en línea recta) es igual a la mitad del Paso Circular (P). La otra mitad corresponde al vano (v).
![]()
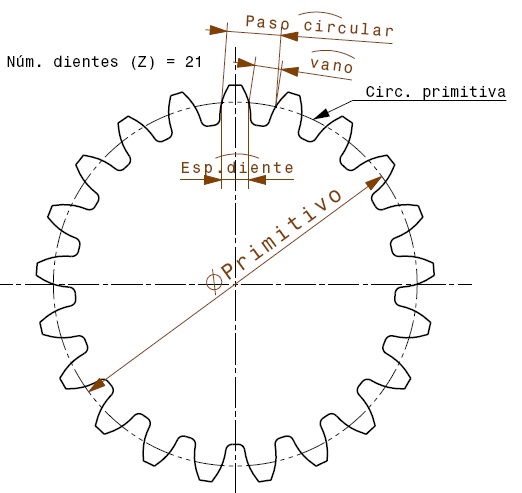
Para facilidad, en vez de hablar de paso circular (P), que es un número decimal largo, se habla del Módulo que es la relación que existe entre el Paso Circular (P) y ![]() . Aunque en muchos sitios se le designa como si fuera un número “adimensional”, en realidad (y sobre todo al aplicarlo en CATIA a las fórmulas) tiene dimensiones, porque el Paso circular viene en milímetros y Pi es adimensional, luego la división da milímetros.
. Aunque en muchos sitios se le designa como si fuera un número “adimensional”, en realidad (y sobre todo al aplicarlo en CATIA a las fórmulas) tiene dimensiones, porque el Paso circular viene en milímetros y Pi es adimensional, luego la división da milímetros.
Debemos tener muy en cuenta que, para que los dientes de un engranaje engranen en los de otro, ambos deben tener el mismo Módulo (M) que es lo mismo que decir tienen el mismo Paso Circular, ¡claro!
Los valores de los módulos están tabulados y son los siguientes:

![]()
En algunos países, que utilizan la pulgada, en vez del Módulo utiliza como referencia el “diametral pitch”, que es el número de dientes que tiene una rueda por cada pulgada de diámetro primitivo. Luego:
El perfil que usamos, en este documento, en los flancos de los dientes es el generado por “las Lineas involuta 3D”. Esa forma es la que siempre funciona, porque, frente al uso de fórmulas::
| La de Fórmula (Fg), | Tienes que tener en cuenta cual es el origen del Sistema de Ejes que estás usando |
| No te equivoques al aplicarle la formula al parámetro del Point: ¿a la x? ¿a la y? ¿a la z? | |
| La Involuta | No le afecta si está en el plano XY, en el XZ, en un plan inclinado, ni nada. |
| Sólo necesita un punto de inicio, en el círculo BASE, y la recta del Eje del Engranaje |
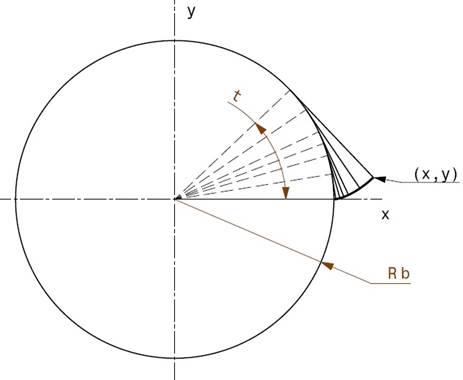
La curva que describe este perfil es la que genera el Punto Extremo de una cuerda (idealmente de espesor cero) que inicialmente está enrollada, al irse desenrollando: La Involuta. En la siguiente figura, la que resulta de desplegar un arco de radio.

Una tela, de espesor cero, apoyada sobre una superficie (Superficie Base) reglada desarrollable (cilindro o cono), al cortarla por una de sus generatrices rectas e ir desarrollándola (de forma tensa, tangente al sólido) su extremo, genera una serie Líneas involutas, y la envolvente de todas esas Líneas involutas, es una Superficie reglada, que es la superficie lateral de un engranaje. En la imagen la Superficie lateral del Engranaje Recto.

![]()
5.1. Plano de presión. Círculo Base.
Para poder definir el trazado de un diente, primero hay que determinar el Circulo Base, cuyo radio (Rb) se puede calcular por trigonometría en función de este ángulo de presión.
El ángulo de presión es el que forma la línea de presión (normal a la superficie del diente en el punto de contacto entre dos engranajes) con la tangente a ambas circunferencias primitivas.
Se utiliza para hacer que la resistencia del diente, a cortadura, aguante la presión.

Autor: Claudio Rocchini (https://es.wikipedia.org/wiki/Archivo:Involute_wheel.gif)
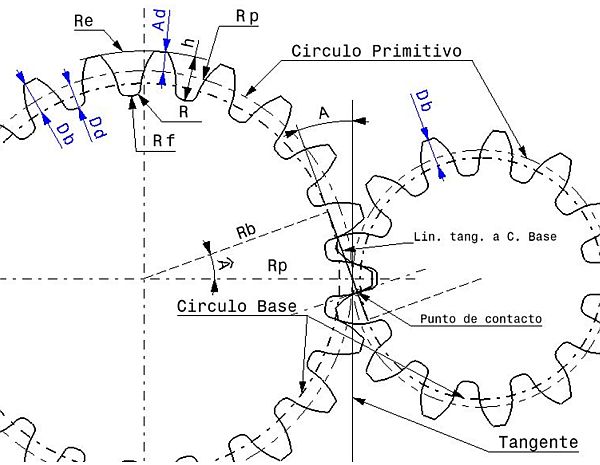
En la figura anterior vemos como se define el radio de circulo Base (Rb), aunque también podemos/DEBEMOS definirlo mediante trazado en CATIA.
| 1.- | Para ello, una vez que tenemos dibujada la Circunferencia Primitiva, obtenemos un punto Extremum, de dicha circunferencia, respeto al eje Z |
| 2.- | Por ese punto dibujamos una recta que forma el ángulo “A”, de longitud suficiente. La identifico como “Line.DePRESION” |
| 3.- |  |
| 4.- | Y usamos el comando “Extremum Polar” para obtener el punto de tangencia, y nos proporciona el Radio, por si lo queremos tener visible en un Parámetro |
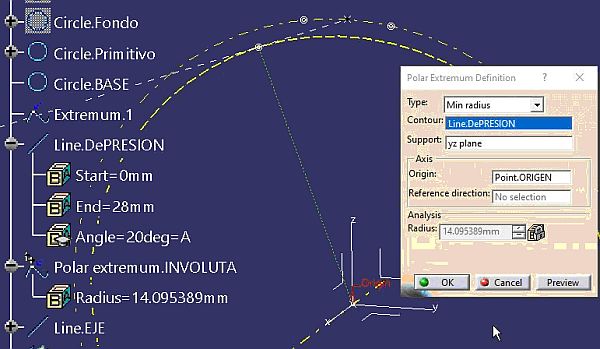
| 5.- | Y por último usamos ese punto como Punto De Inicio de la INVOLUTA |
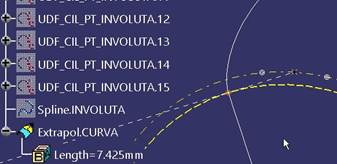
![]() NO confundir el radio del Fondo, con el radio de la “Base”. Los puntos obtenidos por coordenadas, mediante Law, el de valor t=0,empieza en el Radio de la Base, motivo por lo que después hay que extrapolar la curva o superficie por ese extremo.
NO confundir el radio del Fondo, con el radio de la “Base”. Los puntos obtenidos por coordenadas, mediante Law, el de valor t=0,empieza en el Radio de la Base, motivo por lo que después hay que extrapolar la curva o superficie por ese extremo.

Los ángulos de presión mas usados son el de 20° y el de 25°. En algún sitio he visto también 14 ½°.
![]()
Ver vídeo sobre el Plano de Presión: CATIA_V5_Engr_Conicos_Ver_perpendicular.mp4
Las ecuaciones paramétricas de la curva involuta son las siguientes:

Ver formula utilizada:

ald = ( Rb * cos( t * PI*1rad ) ) + ( Rb * (t *PI ) * sin( t *PI *1rad ) )
![]()
![]() El parámetro “t” toma valores: 0< t > 1
El parámetro “t” toma valores: 0< t > 1
Podemos ver esta demostración.
Donde cuando ponemos (t*PI*1rad) estamos diciendo el ángulo que estamos “desarrollando” para calcular un punto:
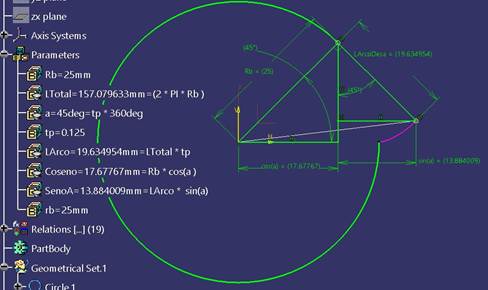
| •“LTotal” => | Longitud total de la circunferencia. |
| •“Rb” => | Radio Base |
| •“a” => | ángulo que calculamos |
| •“t” => | Valor entre 0 y 1, tanto por 100, para media circunferencia. Cuando usamos un parámetro “adimensional” para referirnos al ángulo. |
![]() Pero a la hora de aplicar la fórmula, podemos usar este truco:
Pero a la hora de aplicar la fórmula, podemos usar este truco:
Point.4\X= Relations\ancho.Evaluate(8/180 ) , donde “8” es el ángulo que calculamos y el divisor 180 es un valor fijo.
| • “Larco” => | Longitud del desarrollo de ese trozo de arco (la Involuta) |
| •“Coseno” => | Longitud de esa recta, que se muestra como un “sumando” |
| •“Seno” => | El otro sumando. |
Que consta de dos “sumandos”:
| ► | En el primero ( Rb *cos( t * PI*1rad )), cuando t=0, como cos(0deg) = 1, queda Rb*1=Rb |
| ► | En el segundo, cuando t=0, como sin(0deg) = 0. queda Rb * 0= 0 |
| ► | Con lo que la suma queda: ald= Rb + 0 = Rb |
| Esta es la ecuación si se desplaza en el cuadrante desde x hacia y, pero si lo hace en sentido contrario (empezando en la parte superior del circulo Base y bajando hacia x) tendríamos que cambiar la y por la x. |
Como vemos empieza desde el círculo Base hacia fuera. Pero normalmente el valor del pié del diente (Dd) hace que el circulo de fondo (Rf) quede por dentro del circulo base. Pues bien, esa parte del perfil es una línea recta tangente a la curva del perfil, excepto en los dientes “Stub” según C.N.M. (Comité de Normalización Francés) para el ángulo de 20° en que la geometría hacía el diente más delgado en esa zona, para evitar la temida “interferencia”.
Esa interferencia se puede producir (sobre todo para ciertos ángulos y cuando existe una gran diferencia entre los dientes del piñón y los de la rueda) precisamente en esa zona por no ser “geometría involuta”.
De “Mecanismo de engranajes” (Dto. de Ingeniería de la Universidad Técnica Federico Santa María- Chile)
En la tabla se ven los piñones que tiene interferencia:
| Angulo de Presión= 20° | ||
| Z en Piñón | Z en Rueda (máximo) |
Situación |
| Menos de 13 | Cualquiera (>=13) |
Interferencia |
| 13 | 16 | OK |
| 14 | 26 | OK |
| 15 | 45 | OK |
| 16 | 101 | OK |
| 17 | 1309 | OK |
| 18 | Infinitos | OK |
| Angulo de Presión= 25° | ||
| Menos de 9 | cualquiera | interferencia |
| 9 | 13 | OK |
| 10 | 32 | OK |
| 11 | 249 | OK |
| 12 | Infinitos | OK |
Por la tabla podemos ver que si tengo un piñón de 13 dientes y una rueda de 17 dientes tendría problemas de interferencias, cuando el ángulo de presión es de 20°.
![]()
En algunos estudios posteriores, se documenta que existen “interferencias de tallado” cuando el número de dientes del piñón es inferior a 17, especificando, para Angulo de presión 20°:
| • Z en Piñón el mínimo posible es 5 dientes | |
| • Z en Piñón = 5 | • Z en Ruedas de 20 mínimo. |
| • Z en Piñón = 6 | • Z en Ruedas de 12 mínimo |
| • Z en Piñón = 7 | • Z en Ruedas de 7 mínimo (iguales) |
Nosotros no vamos a entrar en esas correcciones para evitar esas interferencias.
5.3. Resto de los datos del diente. Distancias relativas.
Nosotros vamos a trabajar siempre, sobre todo en los engranajes cónicos, con “distancias relativas, al Círculo de la Primitiva”. Usaremos los parámetros “Ad”; “Dd” y “Db”.
La distancia relativa entre la cabeza del diente es la diferencia que hay entre el Rp y el Radio exterior (Re). También se la conoce como “Adendum” (Ad).
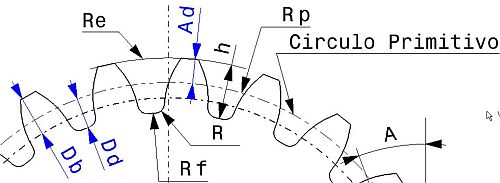
El píe del diente es la diferencia que existe entre el Radio exterior (Re) y el Radio fondo (Rf). También se la conoce como “Dedendum” (Dd).
La altura total del diente (h) es igual, por lo tanto a la altura de la cabeza (Ad) mas la altura del pié (Dd).
Como resulta que el Radio Base puede encontrarse por encima o por debajo del Primitivo (ver imagen siguiente), lo mejor es usar un parámetro a partir del Radio Exterior que, como sabemos es igual a Re = Rp + Ad.
Db = (Rp +M) - Rb = Re - Rb
Lo llamaremos “Db” para compararlo con Dededum.
La unión del flanco del diente con el valle del diente se hace mediante un radio (R), llamado radio del pié.
5.4. Alturas de cabeza y pié del diente.
Para estos parámetros, nos encontramos con muchos valores de Altura de la cabeza y altura del pié.
En libros antiguos como el A. L. Casillas, nos encontramos con valores:
| Para dientes normales: | |
| Ad = M y para Dd= 1.167 M | |
| Para dientes según la casa “Nuttal”: | |
| Ad= 0.7854 M y para Dd= 0.94248 M | |
| Para dientes según Norma Americana Standard A.G.M.A (asociación Americana de Fabricantes de Engranajes): | |
| Ad= 0.8 M y Dd= M | |
| Para dientes según C.N.M. (Comité de Normalización Francés) con 20° de presión: | |
| Ad= 0.75 M y para Dd= 0.95 M | |
| Para la casa “Boston Gear”: | |
| Ad= M y Dd= 1.2M + 0.0508mm (para 20°) | |
| Ad= M y Dd= 1.157 M (para 14.5°) | |
| Según UNE 18016: | |
| Ad = M y Dd= 1.25 M (es el que usaremos) | |
| Para la “British Standard” (con ángulo de presión de 20°): | |
| Para engranajes de precisión con velocidad periférica de más de 600m/min: | |
| Ad = M y Dd= 1.44 M | |
| Para engranajes de clase alta (velocidad de 230a 900m/min) y comerciales (velocidad inferior a 360m/min): | |
| Ad = M y Dd= 1.25 M | |
![]()
Aquí encontramos pocos datos. Según A. L. Casillas:
| • | R (máximo) = 0.3 M |
| • | R (mínimo) = 0.2618 M |
Pero parece extendido por la web el valor de 0.38 M, que es el que usaremos.
Y en la Hembra, el radio de fondo: “RfH”= 0.28 M
En el Macho, el parámetro “Rfm”= 0.3 *M
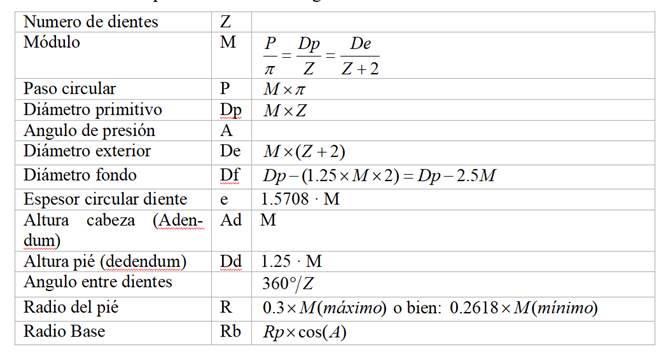
Esta sería la tabla para el caso de S. I. según UNE 18016:
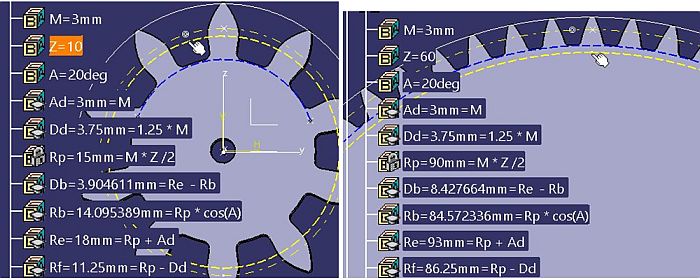
6. Como dibujarlo en CATIA V5.
Ver la continuación: man1001-eng-cilindricos-rectos
Editado el 06/01/2025. Ver Vídeo: CATIA_V5-Lecc_Engranajes-Rectos.mp4
![]()
| Dirija sus preguntas a: juanri@muchocatia.es | Canal YouTube | CATIA V5 R27 Visitante nº |




