CATIA V5: 1004-Elección de los datos para un juego de engranajes. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
CATIA V5: 1004-Elección de los datos para un juego de engranajes.
ue parámetros debo saber para diseñar un juego de engranajes. |
Esa fue la cuestión que me movió en principio a hacer este apartado de Engranajes. Que por ahí se encontraban muchos documentos y algún que otro modelo con parámetros, pero que cuando yo los modificaban “cascaban”.
Y no sabía que era primero: si el huevo o la gallina.
Si vemos los parámetros “independientes” tenemos:
| • | El modulo (M) |
| • | La cantidad de dientes (Z). |
| • | El ángulo de presión (A). |
El resto de los parámetros depende de ellos.
El ángulo de presión sirve para definir las características de resistencia del diente, no afectando ni a la velocidad ni las distancias ni al módulo.
Existe otra relación mas que es la relación entre las velocidades de dos piezas que engranan.
En cualquier caso algo que debemos saber SIEMPRE es la relación de velocidades (Vr) que queremos transmitir: esta es la razón de usar engranajes, no?
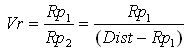
Esta relación se resumen en:
| (9) donde |
| • | Vr es la relación entre la rueda y el Piñón. |
| • | Z1 : El número de dientes de la Rueda. |
| • | Z2 : El número de dientes del Piñón. |
| • | Rp1 : Es el radio primitivo de la Rueda. |
| • | Rp2 : Es el radio primitivo del Piñón. |
![]()
Pero ¿cuales son los problemas que nos podemos plantear?
| a) | Que queremos que dos engranajes rueden en el mismo sentido (además de otras cosas, claro). En ese caso necesitaremos un “satélite” que es otro engranaje que no cambia la velocidad entre ellos poro cambia el sentido de giro haciéndolos iguales. |
||||||||||||||
| b) | Qué necesite una distancia entre los ejes o al menos que esta distancia se mueva en un rango. Para eso hemos puesto el parámetro Rp (radio primitivo) visible. Ya sabemos (o lo hemos imaginado) que la distancia entre dos engranajes como Rueda y Piñón, es igual a la suma de sus Rp’s. En ese caso tendremos dos ecuaciones con dos incógnitas: Si llamamos a la distancia entre ejes “Dist”, tendremos:
|

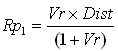
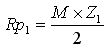

| • | Y esta si relaciona parámetros “de entrada”. Claro, yo, por ejemplo, tengo un juego de engranajes cuyos valores que he hecho (sin mirar la distancia) y me ha salido: |
|
| ► | Dist = 384mm | |
| ► | Vr = 3 | |
| ► | M =20mm | |
![]()
Con lo que me sale:
![]() = 384*3/4 = 288mm
= 384*3/4 = 288mm
![]() = 384 – 288 = 96mm
= 384 – 288 = 96mm
Lo cual es correcto!!. (pero yo lo tenía ya definido)
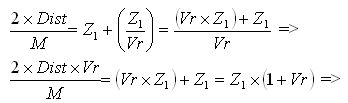
Pero ¿qué pasa si digo que mi distancia es de 210mm, porque estoy obligado por el espacio que tengo en mi diseño?
Pues que el segundo sistema de ecuaciones daría:
En ese caso podía ir tocando al Módulo, para acercarme mas, teniendo claro que de la ecuación (16) sale:
 |
(17) |
Tengo que buscar un valor M tal que ![]() sea un número entero (por ejemplo M=15 que dá
sea un número entero (por ejemplo M=15 que dá ![]() =21)y después que
=21)y después que ![]() =
= ![]() /Vr también de un entero (en ese caso
/Vr también de un entero (en ese caso ![]() = 21/3 = 7dientes). Peroooo: M=15 no está normalizado
= 21/3 = 7dientes). Peroooo: M=15 no está normalizado
Si ponemos M=16 (el mas cercano normalizado) nos dá de distancia = 224mm. Bastante cercano a lo que buscábamos.
| c) | Otra cosa es que tenga ya un engranaje diseñado y quiera engranar con él. Entonces solo necesito saber la relación de velocidad, por que el Módulo ya lo tengo, que es el del otro engranaje, que evidentemente debo saber. |
Colaborador imprescindible: Manuel Rodriguez (de Rota-Andalucía).
![]()
| Sus preguntas a: juanri@muchocatia.es | Can._YouTube | CATIA V5 Visitante nº |




