CATIA V5: Continuación Engranaje cilíndrico. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
CATIA V5: Continuación Engranaje cilíndrico.
Está Vd en: Manuales y Lecciones>>Otros![]() >>Leccion: 1001 Continuación de Diseño engranaje cilindrico.
>>Leccion: 1001 Continuación de Diseño engranaje cilindrico.
 |
|
| ómo dibujarlo en catia v5. Continuación |
Índice
7.4. Cómo se aplica la UDF. Ventajas.
7.5. Perfil simétrico. Posicionar el primer Contorno.
7.6. Completar el perfil.
8. Comprobar con un Montaje
Primera edición el 30/12/2009
7.4. Cómo se aplica la UDF. Ventajas.
He aplicado la fórmula que viene en los libros (al menos en Internet), en varios puntos. Y se comprueba que el resultado del método del desarrollo (que yo utilizo), es el mismo del método de la fórmula…. Pero con la ventaja que es mucho más fácil de aplicar y lo puedes hacer sobre cualquier punto.
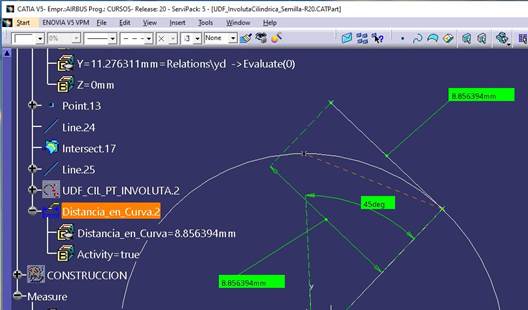
| ► | La longitud de la recta tangente, en mi caso, es exactamente igual a la longitud, en desarrollo, del arco entre los dos puntos, como se ve la UDF “Distancia-en_Cuva”: 8.856394mm. | ||
| ► | Y coincide con el punto “Pt3”. | ||
| ► | He usado: | ||
| • | M = 3mm | ||
| • | Z1 = 8 (numero de dientes) | ||
| • | Rp = (M*Z1) /2 = 12mm (radio del circulo primitivo) | ||
| • | A = 20deg (Ángulo de Presión) | ||
Con lo que se obtiene: Rb = Rp * cos(A) = 11.276311mm
El plano que corta al círculo está a 45°. La distancia entre el punto de corte y el punto, que damos como “dato”, es 8.856394mm. Que es lo mismo que mide la recta que determina el punto “resultado” de la UDF.
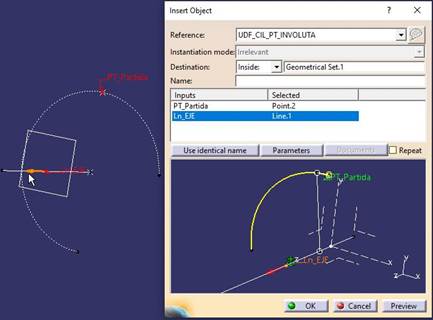
La UDF, al aplicarla pide:
| • | El Punto, (que se supone que está en el círculo Base, pero puede estar en otro círculo). ¿Podríamos usar un punto 1mm hacia fuera del Circulo Base “teórico”? Pues por supuesto. No lleva fórmula. |
| • | Y el Eje de nuestro engranaje (perpendicular a círculo, por supuesto) |
![]() Y al aplicarlo, observa que nos pide el vector de la recta. Si invertimos el vector nos da el punto simétrico… por el mismo precio. Si todos los puntos los incluimos en un solo Geometrical Set, puedes cambiar todos a la vez, ¡Claro!
Y al aplicarlo, observa que nos pide el vector de la recta. Si invertimos el vector nos da el punto simétrico… por el mismo precio. Si todos los puntos los incluimos en un solo Geometrical Set, puedes cambiar todos a la vez, ¡Claro!
Y aplicarle, como hemos dicho antes, el Extrapolate, por el extremo más cercano al Circulo Base de valor (Re- Rf) o bien (Ad + Bd) (que es lo mismo) , para que corte al Circulo de Fondo.
![]()
7.5. Perfil simétrico. Posicionar el primer Contorno.
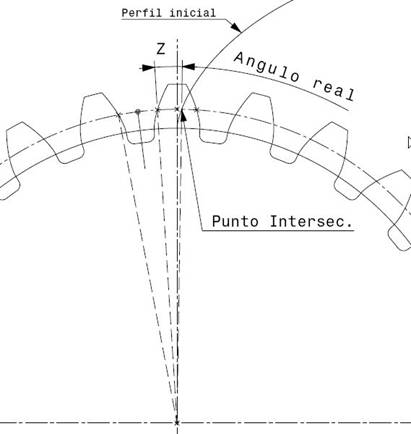
Como el perfil que hemos dibujado no está colocado simétrico respecto del plano ZY, vamos a dibujar elementos auxiliares que nos permiten el giro, sabiendo que en el círculo primitivo debe encontrarse el punto de intersección con el perfil, por lo que:
| • | El paso angular entre dos dientes consecutivos es de 360°/ Z. |
| • | Como el ángulo del vano y el del diente son iguales (insisto: en los puntos del circulo primitivo), el ángulo de medio diente será: 360°/ (4*Z) o simplificando 90°/Z. |
| • | El perfil que hemos dibujado NO tiene el punto de intersección con el círculo primitivo en el eje Z. Hay que creárselo para sumárselo a la rotación. |
![]()
| 16.- | Obtenemos la intersección del perfil con el círculo primitivo, mediante el comando “Intersection”. Identificada como “Extrapol.CURVA”. | |
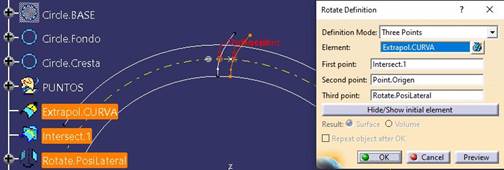
| 17.- | Creamos un “Rotate” del punto ese punto de intersección, con respecto al eje, perpendicular, Z y con ángulo igual a 360deg/(4*Z). Y ese será la verdadera posición del perfil. Ident. “Rotate.PosiLateral” | |
| 18.- | Aplicamos un Rotate al “Extrapol.CURVA”, usando la opción “Three Points”: 1º punto la “Intersec.1”; 2º Punto, el Origen de coordenadas; 3º Punto el “Rotate.PosiLateral”. La identif. Como “Rotate.POSICIONADA”. | |
![]()
| 19.- | Ocultamos la curva “no posicionada”. Obtenemos la Simétrica, mediante el comando “Symmetry”, respecto a nuestro eje (en este caso el Z).
|
|
| 20.- | Y a esa simétrica, le hacemos otro Rotate, esta vez de ángulo 360deg / Z. Queda así: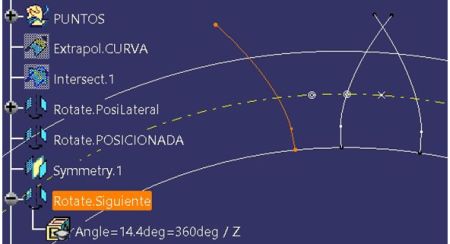 |
Ahora podemos aplicar una paralela a los contornos laterales, con un parámetro de tolerancia “tol= 0,02mm”. Si es con un parámetro, siempre se puede poner el valor a 0mm.
| 21.- | Le hacemos las tres paralelas a las curvas laterales. |
| 22.- | Para asegurarnos el Split, creamos los puntos de intersección, de esas curvas, con la Circunferencia Directriz |
| 23.- | Le hacemos los tres Split, definiendo qué elemento queremos mantener.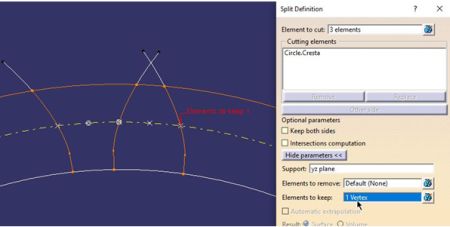 |
| 24.- | Y volvemos a cortar, dejando siempre indicado que elementos mantener o quitar (puntos extremos de las curvas).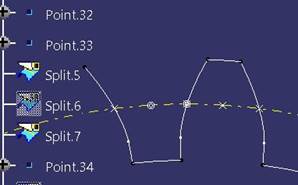 |
| 25.- | Creamos ahora los radios del pié. Deben quedarnos así (los trazos gruesos). |
| 26.- | Hacemos un Joint y ya tenemos un diente completo. |
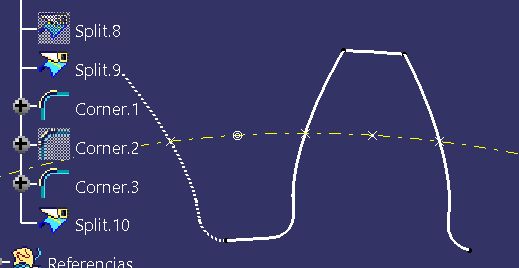
Ya tenemos nuestro primer diente.. ¡Que alegría!!.
![]()
| 27.- | Ya solo queda crear un “Circular Pattern”, opción “Complete Crow” y nº de instancias = Z. Y unir las curvas en un Join.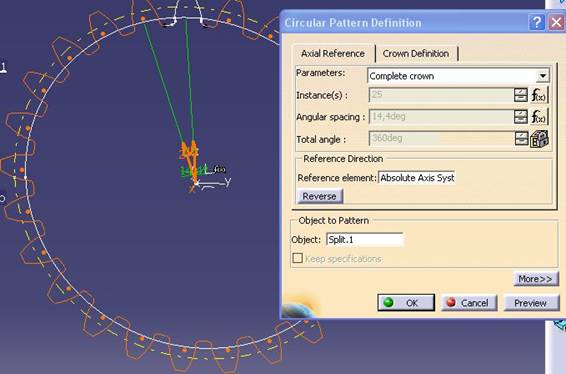 |
![]() Yo, hasta ahora, había hecho la Kinematic de dos engranajes rectos, haciendo que el Punto del Centro del Diente de uno, coincidiera con el punto de Centro del Vano del otro. Pero eso me daba de resultado, cuando no había colisión (Clash), que “no se tocaban”. Y CATIA no tiene la opción de “rozamiento”.
Yo, hasta ahora, había hecho la Kinematic de dos engranajes rectos, haciendo que el Punto del Centro del Diente de uno, coincidiera con el punto de Centro del Vano del otro. Pero eso me daba de resultado, cuando no había colisión (Clash), que “no se tocaban”. Y CATIA no tiene la opción de “rozamiento”.
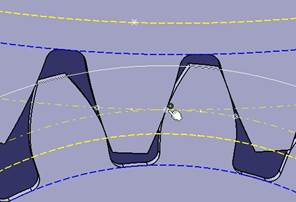
Así, que pensando, he optado por algo “más real”: He obtenido, en el primer perfil de diente creado, dos puntos de intersección de las dos curvas laterales (las paralelas), sendos puntos de intersección con el Círculo Primitivo. Eso me permite que, uno con el otro, su primera posición estén en contacto.
| 28.- | Para facilitar el acceso, creamos un nuevo Geometrical Set para colocar en él los elementos necesarios para relacionarlos con otros engranajes/cremalleras, como son: | |
| ► | Los dos puntos que hemos hablado. | |
| ► Circulo primitivo | ||
| 29.- | Pasamos al Part Design y creamos el sólido. | |
| 30.- | Para facilitar, ocultar los parámetros “internos” que el usuario no debe cambiar. | |
Juanri: Yo he visto por ahí unas formulas para girar el diente mu raras. ¿Qué opinas de ellas?.
Pues opino que yo las he usado y se acercan mucho a lo real, pero no son exactas.
Para comprobar el método, donde el problema está en determinar el plano de simetría, debemos hacer lo siguiente:
| • | Averiguamos los puntos de intersección de un diente por sus dos flancos, usando si es necesario la opción “Geometrical Element Filter” de la paleta “User Filter Selection”. |
| • | Obtenemos los puntos de intersección de los flancos de un vano. |
| • | Aunque sea en línea recta, obtenemos esas distancias |
Deben ser idénticas!! NO parecidas, ojo!!
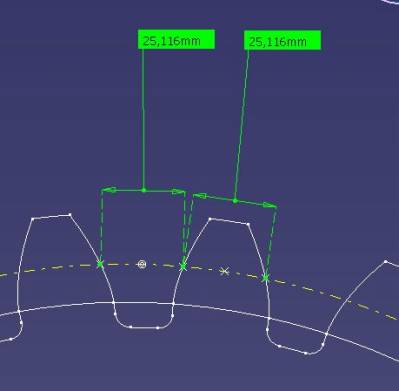
![]()
La tuya lo es? NO? Pues está mal…
Lo primero que debemos hacer, para comprobar el Diseño del engranaje por separado, es hacer cambios de parámetros. Y he probado estas combinaciones:
1.- Copiamos la Pieza con distinto nombre y distinto Part Number.
2.- Creamos un Product al que añadimos un Part nuevo, que sea la parte fija.
3.- Creamos (o copiamos de un Part) el parámetro “M” dentro del Conjunto. Le damos valor de “M” =6, Y los valores de Z son 30 para uno y 16 para otro.
4.- Hacemos que los dos engranajes tengan, como fórmula de “M” el del conjunto.
5.- En la Pieza fija, creamos un parámetro de tipo “Length” “Dist” que sea la suma de los dos radios Primitivos.
6.- Sólo queda montar y hacer que: el “Point.CentroDiente” de un engranaje coincida con el “Rotate.CentroVano” del otro engranaje.
7.- Creamos la Kinematic, con dos Revolute y un Roll Curve de las Circunferencias primitivas, este último con comando.
8.- En el módulo de Kinematic, damos al icono “Clash” y creamos un Chequeo de Interferencia y Contacto entre ambos.
Tenemos puesta un Tol= 0,01mm (paralela al contorno lateral)
Ya sólo queda comprobar, activando censores, que Si debería haber contacto, pero NO clash, en todo el recorrido.
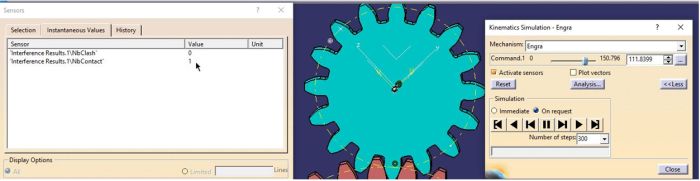
En este caso No existe Clash. Sólo contacto, lo cual es correcto
En otros casos puede necesitar hacerle un Radio en la parte superior, S/ Casilla. O ponerle el parámetro “Tol” de tolerancia mayor.
Lo del Radio en la cresta, lo dejamos para el Usuario.
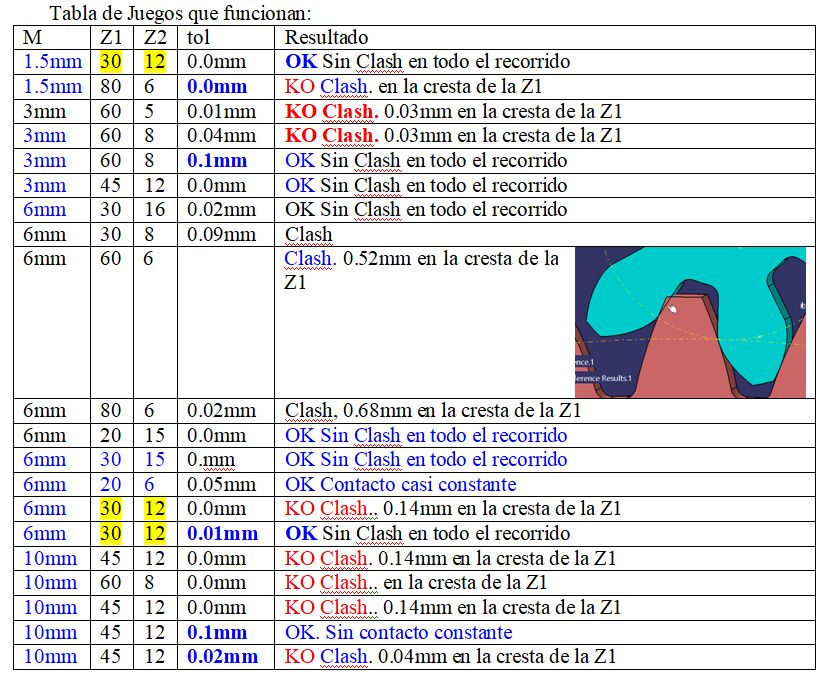
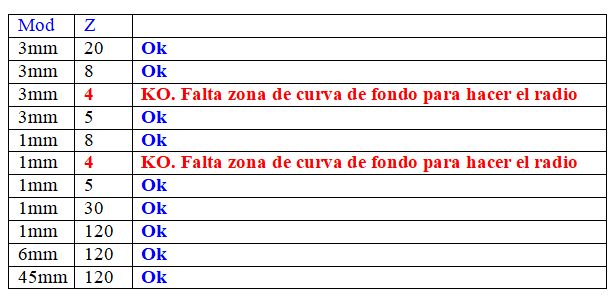
Nota: Parece que las Interferencias están relacionadas sólo con el número de dientes de uno y de otro, NO con el Módulo.
Ver vídeo: CATIA_V5-Lecc_Engranajes-Rectos.mp4
![]()
| Preguntas a: juanri@muchocatia.es | Can.YouTube | CATIA V5 Vis. nº |




