El joint Cylindrical. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
El joint Cylindrical.
Está Vd en: Ejercicios>>Cinemática![]() >> 903_ El joint “Cylindrical”.
>> 903_ El joint “Cylindrical”.
El joint:
 |
||
| ylindrical | ||
El ejemplo más típico de este tipo de joint es el del mando del “futbolín” (que antiguo soy no?.. los niños - algunos con mas de 40 años- hoy en día juegan a la niloentiendo…). Recuerdo cuando me decía mi madre: “¡Que ganas tengo que cumplas los 14 años para ver si se te quitan las ganas de jugar..!”
En el mando del futbolín, la barra se desplaza a lo largo del eje y puede girar sobre el mismo.
Este joint reduce los grados de libertad de 6 a 2: el giro y el desplazamiento a lo largo del eje.
Para ello utiliza una constraints de coincidencia entre dos líneas rectas.
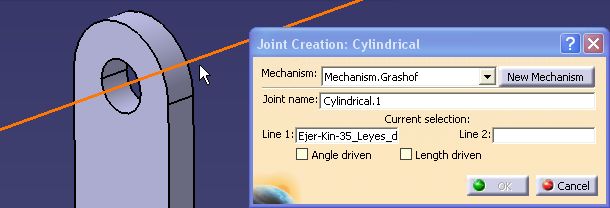
| 1.- | Si damos al icono nos aparece este panel: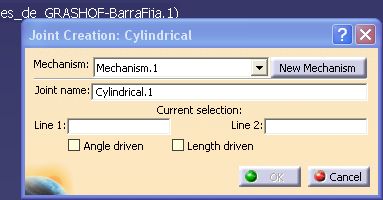 |
||
| • | En el campo “Line 1” seleccionamos la primera línea correspondiente a un Part.
|
||
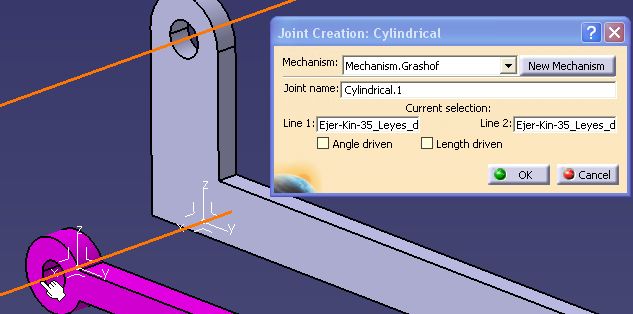
| • | En el campo “Line 2” seleccionamos la segunda línea correspondiente a otro Part.
|
||
| • | Podemos activar las opciones: | ||
| • | |||
| • | |||
| • | O ninguna, si no queremos dar comandos. | ||
Veamos un ejemplo sencillo que recoge las lecciones anteriores:
Se trata de diseñar, con el fin de estudiar las Leyes de Grashof, (Mira este vídeo: https://youtu.be/VgIhRh8eZSM) un mecanismo de cuatro barras. Estas barras tendrán parámetros que permitan editar fácilmente su longitud para comprobar su comportamiento.
![]()
Nosotros vamos a usar esta:
| La Ley de Grashof establece que: un mecanismo de cuatro barras tiene, al menos, una articulación de revolución completa, si y sólo si la suma de las longitudes, de la barra más corta y la barra más larga, es menor o igual que la suma de las longitudes de las barras restantes. |
Pondremos la barra más larga como fija.
El proceso es el siguiente:
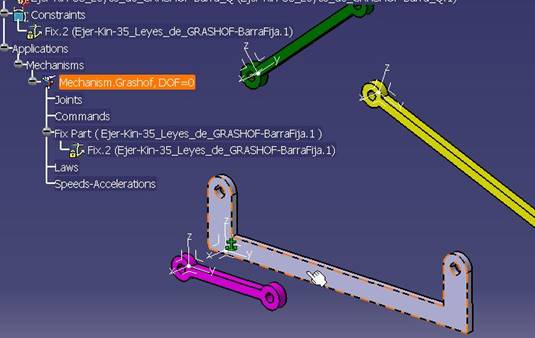
| 1.- | Creamos las piezas en un Product. | |
| 2.- | Creamos un mecanismo al tiempo que definimos como parte fija la BarraFija. | |
| • | Damos al icono “Fixed Part” y al botón [New Mechanism] y le damos el nombre adecuado terminando por seleccionar la pieza “BarraFija”. Esto aparecerá en el árbol:
|
|
| Vamos a insertar la barra mas pequeña que llevará el movimiento. Será la “motora”. Esta barra necesita girar sobre un eje de un taladro (no consideramos los tetones de unión), pero necesitamos definir también su distancia respeto al plano de la pieza fija. Por ello necesitaremos un “Revolute” y no un “Cylindrical”. | ||
| 3.- | Damos al icono “Revolute” y seleccionamos los ejes de un taladro de la pieza fija y el eje de un taladro de la “Barra_L”. También seleccionamos una cara de la fija y la cara mas cercana de la “Barra_L”. Hemos activado el comando mediante la opción 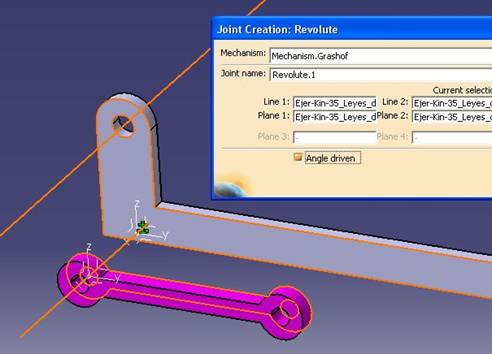
Cuando demos OK nos saldrá el mensaje de que se puede simular.
|
|
| 4.- | La siguiente barra (la verde) también necesita tener una definición en cuanto a distancia respecto de la fija, esto nos lleva a crear otro joint “Revolute” en el otro taladro de la barra anterior. Esta vez sin comando, claro. Al añadir un elemento mas que tiene un grado de libertad, el mecanismo deja de poderse simular y marcará DOF=1.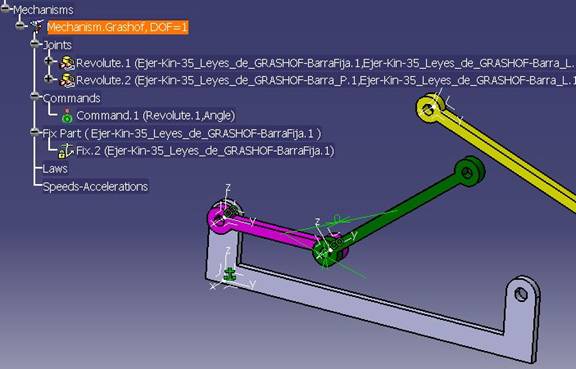 |
|
| 5.- | Ahora uniremos un elemento mas: la barra amarilla. Si en ella la primera unión la definimos determinado la posición en distancia sobre el eje x (distancia a la parte fija) por medio de un “Revolute” con la pieza verde (que a su vez está definida respecto de la morada y esta de la fija) la distancia en el otro taladro estaría definida y SOLO necesitaría un “Cylindrical”. | |
| 6.- | Hacemos otro “Revolute” y después y por último un “Cylindrical”. Debe quedar este árbol: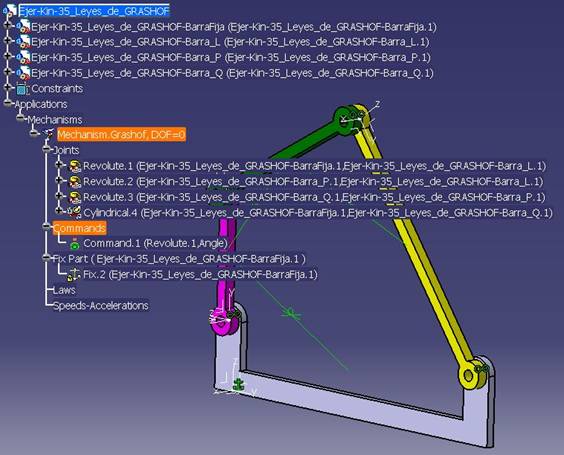 |
|
Como ejemplo podemos hacer el ejercicio de un futbolín. Si no se os ocurre como... ya pondré el enunciado más adelante..
Tengo un vídeo sobre Prismatic y Cylindrical en mi Canal YouTube: https://youtu.be/jL_TuDjsysM
![]()
| Dirija sus preguntas a: juanri@muchocatia.es | Canal YouTube | CATIA V5 R27 Visitante nº |




