CATIA V5: Cinemática (Kinematic). El joint Rigid. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
CATIA V5: Cinemática (Kinematic). El joint Rigid.
Está Vd en: Manuales y Lecciones>>Cinematica![]() >>Leccion: 902_ El joint "Rigid".
>>Leccion: 902_ El joint "Rigid".
El Joint  igid.
igid. 
El ejemplo más típico, en CATIA V5, son las piezas que se mueven relativamente al mismo tiempo que otra. Y se mueven en la misma posición que se encuentran en el momento de aplicarse dicho joint.
Se utilizan mucho para tornillos, fijas de unión o piezas simétricas que se mueven al unísono.
Este tipo de joint hace que la pieza que se una a la cinemática NO aporte ningún DOF.
Para ello añade (o utiliza si ya existe) una constraints de tipo “Fix Together”.

| 1.- | Cuando damos al icono nos aparece este sencillo panel: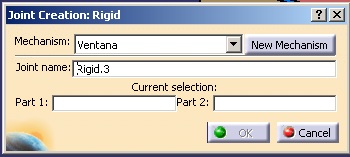 |
Sólo nos queda por seleccionar (sin importar el orden) las dos piezas que queramos unir. No es posible unir mas de dos piezas al mismo tiempo.
Es uno, de los muchos, joint que no pueden usarse por si solo, dado que no puede añadir comando.
![]()
| Dirija sus preguntas a: juanri@muchocatia.es | Canal YouTube | CATIA V5 R27 Visitante nº |




