Descriptiva: Componentes de un Vector. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
Descriptiva: Componentes de un Vector.
Está Vd en: Descriptiva![]() >> Componentes de un vector.
>> Componentes de un vector.
 |
Componentes |
ector Director |
1. Conceptos algebraicos. Motivo de este documento.
2. Ecuación de la recta en el espacio.
3. Rectas en CATIA = Vectores.
3.1. Componentes de ese “Vector”.
3.2 Obtener los cosenos del "Vector Director" de ESA Recta.
3.3 ¿Son lo mismo los Componentes de una recta y los cosenos del Vector Director de la misma?
3.3.1 Relación entre los cosenos de un vector unitario.
4. Trigonometría. Senos y Cosenos.
5. Aplicación de estos conceptos.
5.1. Uso de Vector Unitarios. Cosenos del Vector Director.
6. Conclusión: ¿Componentes o cosenos?
7. Formulas para aplicar en un Ejercicio
1.- Conceptos algebraicos. Motivo de este documento.
Muchas veces, el problema que tenemos, no radica en el conocimiento de “la función de CATIA”, si no en la falta de conocimientos básicos de Descriptiva o de Álgebra Lineal.
Otra cosa que tendremos que tener en cuenta, en este documento, es que existen dos clases de “Ingeniería”:
| • | Ingeniería directa: | Es cuando nos dan todos los datos, sin ambigüedades, para construir algo, con los comandos que tenemos de CATIA, y sólo tenemos que hacerlo. |
| • | Ingeniería “inversa”: | Es cuando nos dan “algunos datos” y tenemos que encontrar el/los que faltan para poder construir “ese algo”. |
En este documento tendremos ejemplo de ingeniería directa:
| • | Cuando nos dan las tres coordenadas del Origen y las tres del Vértice de un vector, con lo cual tenemos: | |
| • | La dirección. | |
| • | El “sentido” (hacia un lado o hacia el otro lado). | |
| • | El punto de aplicación. | |
| • | Y la longitud. | |
Y nos centraremos en ejemplos de ingeniería “inversa”:
| ► | Cuando nos den una recta de la que sabemos, el Origen, dos coordenadas de un punto, perteneciente a la recta, y la longitud de la Recta. |
| ► | O Cuando nos den dos, de los cosenos del vector director de una recta, y “tres condición más”, para determinar cuales son los ángulos que forma esa recta con los Ejes de Referencia, el origen, la longitud y, como salen dos soluciones, en qué cuadrante se encuentra. |
| |
Hablar de “..que nos dan cosenos..” es equivalente a decir que “..nos dan el ángulo, cuyo coseno es….” |
| Hemos hecho un desarrollo basándonos en que nos dan los ángulos respecto de X y respecto de Y. Si tenemos hecho parámetros con sus fórmulas con esos “nombres”, pueden tranquilamente aplicarse a otro dos Ejes, recordando colocarlos después en el “Component” adecuado. | |
| Hemos puesto el Origen de la recta, coincidiendo con el origen del Sistema de Ejes para facilitar la explicación inicial. | |
| Cuando hablamos de ángulos o de cosenos es siempre en “base” a los Ejes de un Sistema de Ejes ortogonales, que definen un espacio de 3 Dimensiones. |
![]()
2.- Ecuación de la recta en el espacio.
Es interesante saber de dónde salen esto datos que vamos a ver. Por lo menos hasta llegar a la ecuación que luego vamos a desarrollar.

Tenemos dos puntos, en el espacio, que definen los extremos de una Recta. Vamos a suponer que la recta va del punto R al punto T.
| ► | Punto R cuyas coordenadas son: x0, y0, z0 |
| ► | Punto T con coordenadas: x1, y1, z1 |
Si proyectamos la recta RT sobre un plano paralelo al XY, que pase por R, obtendremos la recta RQ. Y, como vemos en la imagen, si por los extremos de esa recta trazamos rectas paralelas a los ejes X e Y, obtenemos un triángulo rectángulo.
Y el Teorema de Pitágoras, respecto a los triángulos rectángulos reza así:
“El cuadrado de la hipotenusa, es igual a la suma de los cuadrados de los catetos”.
En nuestra figura, donde el origen de la recta NO está en el Origen del Sistema de Ejes, podemos ver que:
| • | El segmento |
| • | El segmento |
Por lo que:
![]()
La hipotenusa, al cuadrado, es igual al diferencial de x (x1- x0), al cuadrado, más el diferencial de y (y1- y0), al cuadrado. Si el origen de la recta coincide con el origen de coordenadas, los “diferenciales” son simplemente las “coordenadas del punto”.
Esa hipotenusa ![]() , es ahora el cateto de otro triángulo rectángulo.
, es ahora el cateto de otro triángulo rectángulo.
Volvemos a aplicar al Teorema de Pitágoras, y tenemos que el “diferencial” en Z es: Z = z1 – z0
![]()
Si las coordenadas de son R= 0, 0, 0 tendremos:

3.- Rectas en CATIA = Vectores.
Una recta, en el espacio, creada por CATIA V5, se comporta, en el fondo, como un Vector. Probemos:
| 1.- | En un nuevo Part, creo un punto en el origen y le llamo “P0”. Y otro punto por coordenadas (por ejemplo 20, 30, 40) y le llamo “P1”, dándole como “Punto de Referencia” el “P0”. Acabo de darle “cotas relativas a la que tenga el P0”, de acuerdo a la dirección del Sistema de Ejes. Si el P0, le pongo X=3, la X absoluta del punto P1 será 3+20. |
| 2.- | Creo una recta Point-Point, del P0 al P1, en este orden (Start= P0; End=P1), y le llamo “Recta”. Ya tenemos la Dirección (la recta infinita), el Origen (P0) y el “sentido”. |

Probemos que tenemos “sentido”:
| 3.- | Creo un Point, de tipo “On curve” y No le marco Reference->Point. Verás como la flecha indica que su “sentido es desde el P0, hacia el P1” y su Origen el P0. Luego es verdad lo que acabo de exponer ¿no? Si hacemos la recta desde el P1 al P0, la “geometría” estaría en el mismo sitio, pero un punto, Distancia en Curva, iría en sentido contrario. |
Preguntas que tienes que hacerte:
| ► | Para dibujar esa Recta: ¿Tengo límites inferior, superior o de signo para esas coordenadas del Point P1? |
||
| CATIA V5 no tiene el valor “infinito” real. Su “infinito” está limitado por el valor del “Área de trabajo”, definida en Tools Yéndonos a los “limites”: |
 |
||
| • | ¿Cuántos valores (de esas tres coordenadas del P1) podrían ser cero al mismo tiempo? Explícame esas “situaciones” que tipo de recta generaría. | ||
| • | ¿Cuántos valores podrían ser “infinito” al mismo tiempo? Defíneme, en esas “situaciones”, que tipo de recta generaría. | ||
Imagino que habrás descubierto que “casi” no tiene límites y ningún problema con los signos. Puedes modificar cualquiera, que la recta seguirá existiendo… “excepto” cuando los tres sean cero.. Ups.. te he dicho uno ![]() Pero para cada conjunto de esas coordenadas, tendrás un ángulo distinto.
Pero para cada conjunto de esas coordenadas, tendrás un ángulo distinto.
![]()
3.1.- Componentes de ese “Vector”.
En el apartado anterior, he remarcado una frase: “cotas relativas respecto a la dirección del Sistema de Ejes”. Expliquémoslo, como hizo mi amigo Raúl Real.
Si dibujamos una recta, que parte del Origen de la recta (P0), paralela al eje X y de longitud la “diferencia” entre la X del punto P1 y la X del punto P0.
Y otra, con las mismas condiciones, partiendo el final de la recta anterior respecto al eje Y.
Y una última igual que la anterior, pero respecto al eje Z, tendremos la siguiente figura:

Si suponemos el punto P0, coincidiendo con el Origen, ya las “cotas relativas”, coincidirían con las cotas absolutas. Pero recuerda que seguimos haciendo “la resta”.

A esto, en Algebra Lineal, se le denomina “Componentes de ese Vector” (= de esa recta).

Pero no hemos hablado, para nada, que esa recta tenga una determinada longitud. ¡Claro!, que por la forma de definirla (Punto a Punto), si empieza en P0 y termina en P1, tiene todos los datos!: Dirección, sentido, Origen y Longitud, lo cual es sólo en este caso de “Ingeniería Directa”.
Pero este documento se centra en la Ingeniería Inversa, donde nos dan, por ejemplo, el punto de Origen y los ángulos que forma la “Recta” con los ejes X e Y, con lo cual tenemos definida la “dirección y el sentido”. Pero se suponen que nos dará otro dato, para determinar la longitud de dicha “Recta”, o nos darán dicha longitud.
![]()
3.2.- Obtener los cosenos del “Vector Director” de ESA Recta.
 Ufff. Palabras mayores, Juanri.
Ufff. Palabras mayores, Juanri.
Noo. ¡Que va! Verás como ahora te enteras a la primera. Seguimos con el mismo Part.
| 9.- | Dibujemos una Esfera de radio “unidad”… bueno… va a ser muy pequeña. La dibujaremos de “unidad el centímetro”. Vamos a Tools |
| 10.- | Y esta es la esfera, que al cortar a la recta, determina DOS PUNTOS: En este caso uno en el primer cuadrante y otro en el octavo. |
Como comprenderás, todos los puntos de la superficie de la esfera, tiene de condición que su Distancia del Centro, es igual al Radio de la Esfera. Si proyectamos ese punto sobre los ejes, y unimos el P0 con esos puntos proyectados (rectas de color blanco), veremos esto:

Si no tenemos en cuenta la Longitud de la recta, esos son “otros Componentes” de la misma recta.
Y esos “componentes”, pertenecen a un vector muy particular: el Vector unitario, contenido en la recta, (por lo que define su dirección y sentido).
Pues bien: Las longitudes de esos “componentes”, “coinciden” numéricamente (sin tener en cuenta las unidades) con los cosenos del Vector Director de la recta.
En el ejemplo de la figura siguiente, el ángulo que forma con el eje X es de 30deg, al que corresponde un coseno de 0.86602504. Si el ángulo fuera de -30deg su coseno sería el mismo.
Si el ángulo fuera igual, pero hacia el lado contrario, el ángulo sería el suplementario (180 deg – 30 deg = 150deg) y el sentido de los vectores estarían invertidos y se consideraría la “otra intersección” con la esfera). Los “Módulos” de los vectores son iguales pero el coseno sería: cos (150deg) = cos (-150deg) = - 0.86602504. Pero podemos observar que el Vector de trazos, tiene el mismo ángulo, pero negativo, con lo cual tiene el mismo coseno con el mismo signo. Es por lo que hay que definir “en qué sector del triedro nos encontramos”.

Con Descriptiva, esto se soluciona usando dos conos, respecto a dos rectas cualesquiera. En este caso esas dos rectas son los ejes X e Y. Y su o sus intersecciones dan las respuestas. Si no existe la intersección “NO son compatibles” y si existe la tangencia es porque están en el plano XY.

Pregunta: ¿Podríamos usar estos valores como lo hemos hecho en el párrafo 3, como si fueran “componentes”?
Pues, evidentemente SI. Luego a esos “componentes” (de los infinitos que existen), con una condición “especial” (pertenecen a un vector de longitud UNO), se les puede llamar “cosenos del Vector Director de la recta”. ¡Tóma ya!
Pero Juanri: Hablas de “cosenos”… ¿pero de qué ángulos?
Pues de los ángulos que forman ese Vector Director (y esa línea) con los ejes: X, Y y Z respectivamente.
3.3 ¿Son lo mismo los Componentes de una recta y los cosenos del Vector Director de la misma?
Esa es la pregunta fundamental. Y la respuesta es:
NO. Ahora pregunto yo:
![]() ¿Tú puedes dar cualquier coordenada (X, Y y Z) al punto extremo de esa recta?
¿Tú puedes dar cualquier coordenada (X, Y y Z) al punto extremo de esa recta?
Si.. Siempre y cuando no tenga las mismas coordenadas del punto Origen de esa recta, dado que, en ese caso, la longitud de la recta sería cero => Imposible. Es un caso de Ingeniería Directa.
![]() ¿Tú puedes dar, a una recta, un ángulo respecto al eje X, otro respecto al eje Y y otro cualquiera respecto al eje Z?
¿Tú puedes dar, a una recta, un ángulo respecto al eje X, otro respecto al eje Y y otro cualquiera respecto al eje Z?
Depende: Digo “depende” porque puedes dar ángulos respecto a dos ejes y el tercer ángulo está sometido a una “Relación”, que se tiene que cumplir.
Hombre si el ángulo respecto a X es 30°, respecto a Y es 60°, esa recta estaría en el plano XY y yo, sin hacer “relaciones matemáticas” te digo que el ángulo, respecto a Z es 90°. Pero de memoria he hecho una relación: Los ángulos respecto a X y a Y tienen que sumar 90°, para estar en el plano XY.
Es un caso de Ingeniería Inversa.
Para ángulo, respecto a una recta, consulta: https://www.muchocatia.es/nivel0/des-002-elementos-que-forman-angulos.html
El 16/12/2021, me Me dice mi amigo José Ramón Cornejo:
![]() Pero Juanri: Si me dan los ángulos de una recta, respecto a X e Y, un punto de Origen y la longitud, ya sé que, aunque yo convirtiera esos “cosenos” del Vector Unitario en “componentes” de un vector de módulo igual a la longitud, simplemente multiplicando cada uno de los cosenos por ese “módulo”, la “dirección” sería la misma, pero la “Longitud”, en el comando Line, opción “Point-Direction” se le da en otro campo.
Pero Juanri: Si me dan los ángulos de una recta, respecto a X e Y, un punto de Origen y la longitud, ya sé que, aunque yo convirtiera esos “cosenos” del Vector Unitario en “componentes” de un vector de módulo igual a la longitud, simplemente multiplicando cada uno de los cosenos por ese “módulo”, la “dirección” sería la misma, pero la “Longitud”, en el comando Line, opción “Point-Direction” se le da en otro campo.
Pero podría crear un Point, con referencia al Origen y cuyos valores X, Y y Z sean, respectivamente, cada coseno multiplicado por el Módulo ¿no?
![]() Efectivamente, Joserra. Es lo mismo que digo en el párrafo párrafo 3.2 Obtener los cosenos del “Vector Director” de ESA Recta.
Efectivamente, Joserra. Es lo mismo que digo en el párrafo párrafo 3.2 Obtener los cosenos del “Vector Director” de ESA Recta.
Mira esta figura y verás una recta de módulo 1, cuyos “cosenos” son:
X= 0.5; Y=0.5; Z= 0,707106781
Y otra cuyos “componentes” son los mismos multiplicado por 10:
X= 5; Y= 5; Z= 7,07106781
Una es mas larga que la otra… porque el parámetro “End” en una es 1cm y en la otra es 10cm

Si todos los “componentes” guardan relación con los cosenos, la dirección es la misma. Buena solución la de crear un Punto. Me la apunto.
3.3.1 Relación entre los cosenos de un vector unitario.
Como estamos pensando en ingeniería inversa, y estos “cosenos” sólo dependen de los ángulos respecto a ejes, que es lo que en este caso nos dan, tendremos que saber qué relación existen entre ellos.
De la ecuación que sigue, siendo A el módulo del componente en X, B el del Y y C el del Z, tenemos:
![]() Y si D=1 (vector unitario), tenemos que:
Y si D=1 (vector unitario), tenemos que:
![]() , siendo A, B y C los cosenos de los ángulos, que forma el vector, respecto a los ejes X, Y y Z.
, siendo A, B y C los cosenos de los ángulos, que forma el vector, respecto a los ejes X, Y y Z.

Según el teorema de Pitágoras, sobre el triangulo rectángulo, dice que:
| ► | La hipotenusa, al cuadrado, es igual a la suma de los cuadrados de los catetos. |
En la figura anterior, vemos las líneas que representan los cosenos de X e Y y la línea que representa el seno respecto de Z. Y podemos observar que esa línea amarilla, identificada como “Seno de (90° - C) = cos (C)”, tiene la misma longitud de la línea identificada como “coseno ( C) “. Como lo que nos interesa son los cosenos, tendríamos que hacer esa conversión (tomar la línea como cos (C) ), para que estos valores sean los que necesitamos.
Pero podemos deducir, por la imagen anterior, que:
![]() Lo que implica =>
Lo que implica => ![]()
Vemos que C (coseno respecto a Z) puede tener valor positivo o negativo, como vimos en el corte con la esfera: Por encima del plano XY o por debajo.
| ► | La suma de los cuadrados de los cosenos de un vector unitario es siempre 1. |
| ► | O dicho de otra forma: |
Pero C SI puede ser negativo, por eso está con el signo ±
4. Trigonometría. Senos y Cosenos.
Os voy a recordar la relación que existe entre las longitudes de los lados de un triángulo rectángulo, cuando la longitud de la hipotenusa es igual a la “unidad” y las relaciones trigonométricas. Consideraremos el ángulo alfa (α) como el situado en el centro del círculo de radio igual a la unidad, por el que se desplaza un extremo de la hipotenusa.
Recordaremos que el seno del ángulo alfa es igual a la longitud del cateto opuesto (yo, nemotecnicamente digo “de frente”) partido por la longitud de la hipotenusa (el radio). Y ya sabemos que, al dividir una longitud por otra longitud (se simplifica), el resultado es lo que se llama una “proporción”, o sea: un número Real sin dimensiones. Y que al ser, en este caso, la longitud de la hipotenusa 1, la proporción es el mismo valor numérico, pero ya sin unidades.
![]()
Y el coseno es lo mismo pero con el cateto contiguo (yo, nemotecnicamente digo “de abajo”).

5.- Aplicación de estos conceptos.
Esa es la pregunta que os hacéis:
![]() Juanri: ¿Cuándo se aplica esto en CATIA V5?
Juanri: ¿Cuándo se aplica esto en CATIA V5?
Pues se aplica en cualquier comando que nos pida una dirección. En esos comandos, en el campo “Direction”, con el botón derecho del ratón (¿qué haría yo sin el botón derecho?) seleccionaríamos “Edit Components” (¡Vaya: ya salió otra vez “components”!)
Por ejemplo (ingeniería inversa):
Queremos dibujar una recta, desde un punto conocido, en la dirección que tendría otra que fuera desde un punto (P0) a otro existente (P1). Si medimos la diferencia entre los dos puntos, respecto a nuestro Sistema de Ejes, tendríamos esto:

Vemos que nos da los “Components”, que son los que tendríamos que aplicar aquí:

![]()
![]() Juanri: Pero tú no le has puesto unidades.
Juanri: Pero tú no le has puesto unidades.
Cierto. CATIA V5 va a protestar, pero vale porque es igual ponerle unidades o no ponérselas. Son “proporciones”. En este caso, estamos dando “Componentes” que no llegan a la condición (más restrictiva) de cosenos del Vector Director.
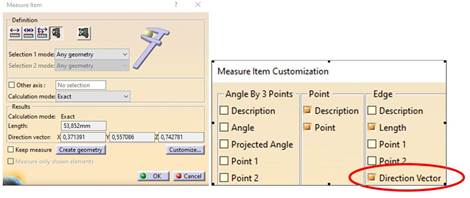
Si hacemos una medición con el icono “Measure Item”, customizado adecuadamente, nos daría esos cosenos del Vector Director.
Y en la Ingeniería Inversa, cuando nos dan los ángulos de una recta respecto a dos Ejes ortogonales. No se puede usar respecto a dos líneas cualquiera.
5.1.- Uso de Vector Unitarios. Cosenos del Vector Director.
![]() La pregunta es ¿para qué nos puede servir esto?
La pregunta es ¿para qué nos puede servir esto?
Pues el concepto lo deben tener muy claro los profesionales del Programación de Control Numérico (C/N), ya sea con CATIA o con otro software.
La herramienta normalmente usada en C/N es una fresa, de forma cilíndrica, cuya punta puede ser plana o en forma de esfera. A esa geometría se le asocia un vector unitario (Vector director), cuyo origen se encuentra en el centro, en la punta de la herramienta; se alinea con el eje de la herramienta y la dirección del vector va hacia el interior de la fresa.
![]()

En el programa se define, para máquinas de 5 Ejes:
| ► | La posición del Origen de esa fresa, por tres coordenadas (X, Y y Z). |
| ► | La orientación del vector, dado por los cosenos del vector director. |
Y el programador sabe, de memoria, los valores principales:
| Valores (coseno respecto a x, a y, respecto a z ) | Posición de la herramienta | ||
| x | y | z | |
| 0 | 0 | 1 | La herramienta esta en posición vertical, perpendicular al plano de la mesa (plano XY), dado que el coseno de z es 1. |
| 0 | 1 | 0 | La herramienta está tumbada, paralela al plano XY, alineada con el eje Y, dado que el coseno de y es 1. |
| 1 | 0 | 0 | La herramienta está tumbada, paralela al plano XY, alineada con el eje X, dado que el coseno de x es 1. |
| 0 | 1 | 1 | La herramienta está en el plano YZ, dado que el coseno de x es cero. Y al ser los otros dos cosenos (de z y de y) iguales, forma el mismo ángulo respecto de ellos, por lo que ese ángulo es 45°. |
| 1 | 1 | 1 | La herramienta está orientada con el mismo ángulo respecto a los tres ejes coordenados. |
En el último ejemplo, realmente los cosenos del vector unitario, sería: 0,577350269, pero se puede definir por sus componentes: 1, 1, 1, lo que realmente definiría un vector en esa dirección, NO unitario, dado por sus componentes.
6.- Conclusión: ¿Componentes o cosenos?
Al final hemos descubierto que:
| • | Los “Componentes” son una proporción entre los diferenciales de las coordenadas relativas, que definen todos los datos de una Line. | |
| • | Y los cosenos, son “componentes” que tienen una limitación: Deben cumplir ciertas reglas matemáticas y que definen sólo la dirección y el sentido. |
![]()
7.- Formulas para aplicar en un Ejercicio.
![]() Juanri: Si quisiéramos obtener, en un Geometrical Set, una Line, tipo Point-Direction, con parámetros, tipo cosenos: ¿Cuáles serían las fórmulas a aplicar?
Juanri: Si quisiéramos obtener, en un Geometrical Set, una Line, tipo Point-Direction, con parámetros, tipo cosenos: ¿Cuáles serían las fórmulas a aplicar?
Antes que nada, recordarte que debes cambiar de nuevo las unidades.
Pues mira:
| 1.- | Tendrías dos G. Set: uno con Datos (un punto de origen de tipo “isolate”) y otro con los Resultados |

![]()
| 2.- | Metemos en los resultados los parámetros. Recordar que los cosenos son de tipo “Real”. | |
| 3.- | Y esta serían las formulas: |
| cos_X = cos (Ang_X ) | El ángulo debe ponerse dentro de un paréntesis, en sus unidades (deg) | |
| cos_Y = cos (Ang_Y ) | Como el anterior | |
| Suma_Cuadrados = (cos_X ** 2) + (cos_Y ** 2) | ** 2 | significa “al cuadrado” |
| cos_resultante_Z = sqrt ( 1- Suma_Cuadrados ) | sqrt | significa “raíz cuadrada” |
| Ang_resultante_Z = acos (sqrt ((1-Suma_Cuadrados ))) | acos | significa “el ángulo cuyo coseno es tal” (contar los paréntesis) Este es por "comprobar", pero No hace falta . Solo los cosenos |
Ya sólo falta darle a la recta, la “Direction” por los “Components””, usando “cos_X”; “cos_Y” y “cos_resultante_Z”. Los ángulos no los usamos y sólo servirían para comprobar.

¿Por qué no lo intentas y me lo comentas?
![]()
Dado por El Juanri, en El Puerto de Santa María a 5/05/2020
Revisado a 20/12/2021, en Sevilla
Colabora: Ricardo Martinez y José R. Cornejo
| Dirija sus preguntas a: juanri@muchocatia.es | CATIA V5 R27 |




