Cinemática (Kinematic). Definiciones y reglas generales. - MuchoCATIA
Menu Principal:
- Home
- Quienes somos
-
Teoría CATIA
- Manuales y Lecciones
- Geom. Descriptiva
- Tratam. de la inform.
- Por donde y cómo?
- Ejercicios
- Utilid/Videos
- FAQs
- Mapa de la web
- Link's de interés
Cinemática (Kinematic). Definiciones y reglas generales.
Está Vd en: Manuales y Lecciones>>Cinematica![]() >> Definiciones.
>> Definiciones.
 eremos en esta hoja:
eremos en esta hoja:
1.- Introducción.
2.- Entrada en el módulo.
3.- Glosario.
3.1.- Limitaciones y recomendaciones.
3.2.- Relación Assemble-Kinematic.
3.3.-Parámetro tiempo.
4.- Mecanismo completo.
El módulo DMU Kinematics Simulator es un módulo, independiente del diseño, dedicado a simular los movimientos de los elementos que componen el Assembly (CATProduct).
Con este módulo podemos:
| • | Definir Mecanismos Cinemáticos. |
| • | Simular movimientos con mecanismos. |
| • | Detectar, de forma dinámica, las colisiones. |
| • | Manejar mecanismos diseñados en CATIA V4. |
![]()
Antes de leer estos Manuales, es recomendable haber leído el Manual de Entorno y el de Assemble del mismo Autor. Y haber leido (además de comprar) el libro "Aprender CATIA V5, con Ejercicios. Diseño en Contexto" .
A este módulo se accede a mediante el menú Start![]() Digital Mockup
Digital Mockup![]() DMU_Kinematics.
DMU_Kinematics.
Cuando nos referimos, en este Manual a “productos” queremos decir instancias de Part’s contenidos en un CATProduc´s (Product’s) contenidos en otro Product superior. Los términos que se utilizan en este módulo son:
| ► | Degrees Of Freedom : | (D.O.F.) Determina el número de “Grados de libertad”, es decir el número de distintos tipos de movimientos posibles: Rotaciones, translaciones. Por ejemplo: Una pieza, sobre un plano (en 2D), puede trasladarse en Vertical y Horizontal (cualquier otra traslación es un resultado de estas dos componentes) y rotar sobre sí misma. Luego tiene, caso de no tener ninguna restricción, 3 grados de libertad. |
|
| • | Por el simple hecho de encontrarse dentro del Product, en el cual hacemos un Mecanismo, una pieza no añade grados de libertad al mecanismo. Pero en el momento en que, con algún Joint, se selecciona ese Producto nuevo, se le añade a la cinemática 6 grados de libertad, excepto los grados de libertad que le quite el Joint con el cual se ha añadido a la cinemática y el que quita el Comando (caso que ese Joint lo tenga) y esté activado, claro. |
||
| • | Si suponemos unos ejes ortogonales, estos grados están asociados a los posibles movimientos que tiene: Desplazamientos en los ejes X, Y y Z y giro respecto de los mismos (alfa, beta y gamma).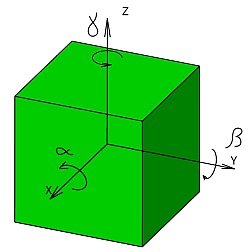 |
||
| • | Hay personas que se “agobian” cuando ven que, el grado de libertad, del mecanismo aumenta. Y quieren solucionarlo “añadiendo comandos sin ton ni son”. Pero los Comandos deben ser 1 y si no es posible los mínimos necesarios. |
||
| • | Si existe más de un Comando significa que no podemos simultanear el movimiento que genera cada Comando a no ser que usemos leyes (Law). |
||
![]()
| ► | Fixed Product: | Es el elemento que se mantiene estático, cuando el Mecanismo Cinemático está en movimiento. |
|
| ► | Joint: | (Uniones) Es una restricción (constraint) entre entidades geométricas de dos o tres productos. Existen varios tipos de joint. | |
| ► | Commands: | (Comandos) Valores angulares o lineales que dirigen los movimientos cinemáticos. La adición de comandos reduce los grados de libertad (DOF). Existen Joint que permiten añadir un comando y otros que no permiten añadir ningún comando. | |
| • | Para poner comandos en mecanismos reales debemos pensar donde está realmente “el motor”. En el caso de una bicicleta, el “motor” está en el plato, que mueve (por medio de la cadena) el piñón y este a la rueda trasera. El caso de un “mecanismo” de dos comandos es el ejemplo de una barra de “futbolín” (no sé si los jóvenes saben que es eso.. jejeje). Tiene el comando de deslizamiento y otro de giro sobre su eje. |
||
| ► | Mecanismo cinemático: | Es un mecanismo compuesto por varios productos conectados mediante joint’s. Este puede ser simulado cuándo, con un determinado número de comandos (Commands), se igualan los grados de libertad (Degrees of freedom), reduciéndose a CERO. En este caso se dice que el mecanismo está “completo”. |
| ► | Dress up: | Es una lista de modelos asociados a un producto del modelo cinemático. Estos modelos tienen el mismo movimiento que el producto. |
| ► | Simulación Cinemática: | Es la simulación de los movimientos de un mecanismo usando comandos o leyes. La simulación se puede hacer de forma inmediata (los comandos pueden usarlos solo de uno en uno) o “on request” al dar al Play (uno o mas comandos pueden ser usados dando un numero determinado de pasos). |
| ► | Law: | Una representación numérica o gráfica de los comandos aplicados a un mecanismo cinemático, normalmente como una función del tiempo. |
3.1.- Limitaciones y recomendaciones.
| ► | La cinemática se construye con productos perteneciente al CATProduct raíz. Si tenemos en un Product raíz otros CATProduct´s hijos, si queremos que una pieza perteneciente a uno de esos product´s hijos tenga movimiento, todo el CATProduct al que pertenece tendrá el mismo movimiento, excepción hecha del uso del comando “Mechanism Dressup”. |
| ► | Si queremos hacer un Joint con un subconjunto incluido en el product raíz, por ejemplo un “Revolute” que tiene coincidencia de ejes y coincidencia de planos, estas coincidencias se tienen que hacer contra el mismo Part del subconjunto; no vale hacerla la del eje contra un Part y la del plano contra otro Part del mismo subconjunto. |
| ► | Nosotros recomendamos utilizar el módulo de Assemble para montar el conjunto, utilizando para ello las constraints necesarias . Si una constraint sólo sirve para dar la primera posición, una vez el sólido en esa posición (hecho el Update) debemos identificar con un nombre adecuado esa constraint y después desactivarla. Esto nos servirá para, en caso de apuro, restaurar la posición inicial. |
| ► | Es importante que el mecanismo, antes de empezar a definir Joint’s, esté en su “posición de partida” y no relajarnos pensando que existe la opción de poner el comando a cero, pues hay comandos que no se pueden poner a cero. Esto es fundamental cuando se emplean leyes. |
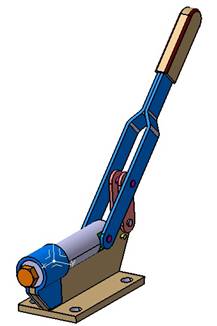
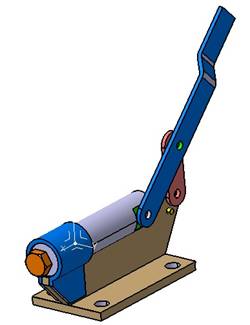
| ► | Si en un conjunto existen pasadores, tornillos de fijación entre piezas o piezas simétricas que se mueven al unísonas, es conveniente “no meterlas en la conversación” porque pueden formar un lio. En esos casos las montaremos en assemble en su posición inicial, pero a la hora de hacer la cinemática ocultaremos las instancias de esas piezas. Tampoco es necesario meter en la conversación las piezas “fijadas” a otras que se muevan. |
![]()
|
|
Conjunto completo. |
Conjunto para simular inicialmente. |
| ► | Una vez que el mecanismo se mueve correctamente, lo dejamos (como siempre) en su posición inicial antes de salir de la simulación y entonces le añadimos los “Rigid” que unen esos pasadores, tornillos y piezas fijas a las que ya se mueven, para que las acompañe. |
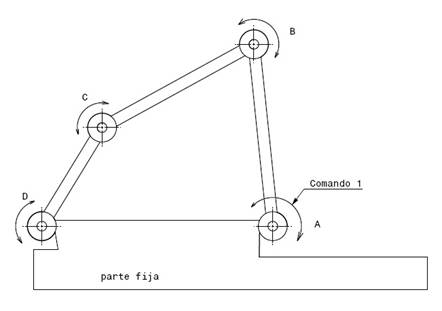
| ► | Es recomendable, a la hora de hacer la cinemática, empezar por el punto de la cadena cinemática que tiene “el motor” (comando), y seguir desde ese elemento al siguiente y así sucesivamente. |
En el ejemplo de la figura, el orden sería:
| • | Definir la parte fija. | |
| • | Definir el Joint A con comando. Saldría un mensaje que “el mecanismo puede ser simulado”. |
|
| • | Definir el Joint B. saldría un mensaje que “el mecanismo YA NO puede ser simulado”… sin problemas.. | |
| • | El Joint C y después el D. Se cerraría la cadena cinemática y volvería a salir el mensaje de que “el mecanismo puede ser simulado”. | |
| • | En ningún momento nos saldría en grados de libertad = Indefinido |
Si trabajamos para construir el conjunto “en contexto”, debemos asegurarnos de que no existan links geométricos entre los componentes de la cinemática, dado que tendremos problemas a la hora de hacer los joint por que las constraints no puedan actualizarse.
![]() Bueno, en general (no solo en cinemática) podemos decir que las constraints en un assembly están reñidas con los links: o unos u otros, pero no revueltos.
Bueno, en general (no solo en cinemática) podemos decir que las constraints en un assembly están reñidas con los links: o unos u otros, pero no revueltos.
![]()
3.2.-Relación Assemble-Kinematic.
Este tema puede provocar más de una confusión. ![]()
Sabemos que en el módulo Assembly podemos crear constraints. Y con esas constraint, para cosas “elementales y de poco cálculo”, CATIA V5 es capaz de realizar movimientos sin control de velocidades, por ejemplo, mediante el compás y el uso de la tecla Shift (mayúscula).
Y eso puede hacer pensar, a algún lector, que ya tiene definida la cinemática. Y eso no es así.
Es cierto que en la cinemática, la mayoría de los Joint crean (o utilizan si ya existen) constraints de Assemble y si estas se eliminan los comandos se quedan “con el culo al aire”…![]() aunque en algunos caso me sigan funcionando, pero no es lo correcto.
aunque en algunos caso me sigan funcionando, pero no es lo correcto.
Si tenemos creadas constraint’s en assembly estas pueden utilizarse para la cinemática, pero la cinemática hay que definirla mediante joint’s .
La forma de hacer, que un mecanismo se mueva mediante una Ley, es poner la Law en función del tiempo. Esto se hace con un parámetro de tiempo que trae asociado la Cinemática y que se llama KINTime.
La unidad de este parámetro es el segundo, por lo tanto, si nuestro mecanismo se llama “Mechanism.1”, su parámetro se llamará “Mechanism.1\KINTime” y valdrá x segundos (normalmente cero segundos) inicialmente e irá aumentado de valor conforme aumente el tiempo de simulación.
Si tenemos un mecanismo con un comando lineal, cuyas unidades vienen dadas en milímetros, si queremos que se mueva a una velocidad de 52 milímetros cada segundo, lo podremos en la fórmula como:
| □ | Mechanism.1\KINTime /1s * 52mm |
![]()
Si el comando fuese angular, multiplicaríamos por deg (grados) en vez de por mm.
Un mecanismo, mientras no este “completo”, no puede simularse.
Se dice que un mecanismo está “completo” cuando tiene un DOF=0, y además tiene:
| • | Una parte fija. | |
| • | Y al menos un comando. |
Luego estos tres elementos son imprescindibles.
Para saber si un mecanismo esta correcto existe un comando que analiza el estado del mecanismo. Para ello damos al icono “Mechanism Analysis”  de la paleta “DMU Kinematics” y nos sale este panel:
de la paleta “DMU Kinematics” y nos sale este panel:
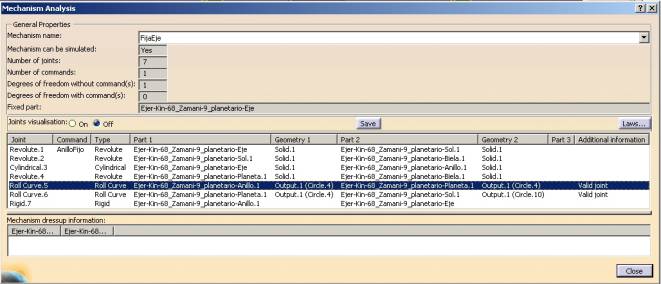
Donde cabe destacar la siguiente información:
| ► | “Mechanism can be simulate” | El mecanismo puede ser simulado = Yes |
| ► | “Degrees of freedom without command(s)” | Grados de libertad sin comando(s) = 1 |
| ► | “Degrees of freedom with command(s)” | Grados de libertad con comando(s) = 0 |
Y en los comandos que no tiene constraints, como “Roll-Curve”, “Point-Curve” y “Slide-Curve” pero requieren que estén los elementos en contacto en la columna “Additional Information” debe aparecer el comentario “Valid joint”.
Estos resultados pueden extraerse a un fichero dando al botón [Save].
Tenemos un nuevo vídeo sobre los Principios: https://youtu.be/lHi67V3tIdo
![]()
| Dirija sus preguntas a: juanri@muchocatia.es | Canal YouTube | CATIA V5 R27 Visitante nº |




